Things I choose to be
Muslim
Engineer

I made a website, therefore I am. - Bn
Driving, breaking, fixing, moding, racing cars is life. Anything that happens before or after is just waiting.

Imagine knowing motorcycles exist and still choosing golf.

Have they not travelled throughout the land so their hearts may reason, and their ears may listen? Indeed, it is not the eyes that are blind, but it is the hearts in the chests that grow blind.
I did not download these from Google. Trust.

Mostly racing on simulators, but I take Counter Strike very seriously.

I love drumming and music. My neighbours have a different opinion.

Drones, computers, RC builds, robots, cars or any thing else with silicon or gears. Currently building a home AI server so the robots can become slightly more useful and hopefully not judgmental.
I haven’t done much game development recently, but back in uni I had a big game dev empire.
I’m a mechanical and robotics engineer working across simulation, intelligent hardware, and prototype development. My main interests are digital twins, robotic assembly, autonomous systems, vehicle technology, and software.
I like building systems that move from idea to simulation to physical testing.
I do these things not because they are easy, but because I thought they will be easy.

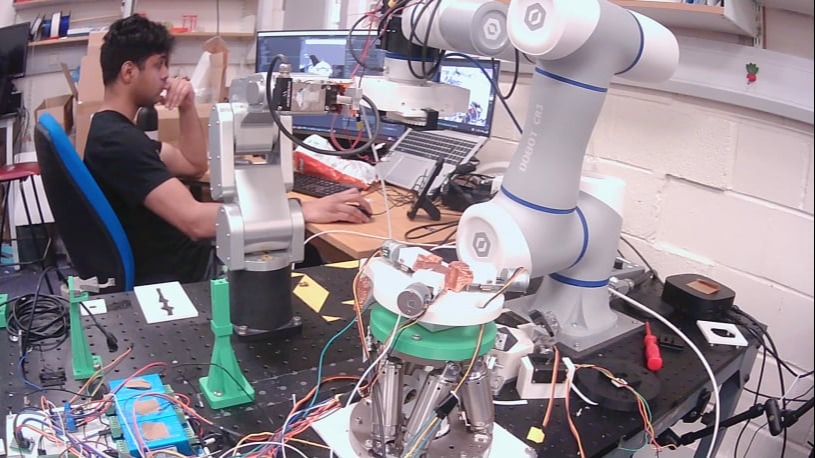
Research Demo
My doctoral research focuses on developing a flexible, fully automated multi-robot assembly system for high-value manufacturing. The system uses a real-time digital twin to monitor, validate, and control precision robotic assembly processes.
The project involves robotic system design, sensor feedback integration, key performance parameter identification, and digital twin development for process monitoring and closed-loop control.

4SB is a flexible autonomous battery-swapping system designed for rapid EV battery replacement. The project focuses on creating a closed-loop robotic system capable of handling battery replacement with speed, repeatability, and safety.
I am developing the end to end autonomous swapping solution including AGV robots and battery dispensing stations.

I led a government-funded project to develop a compact modular hybrid powertrain for light motor vehicles. The system was designed to operate in both series and parallel hybrid modes while requiring minimal changes to conventional internal combustion engine platforms.
The project involved prototype development, securing IP, simulation, test-bench validation, and industry collaboration. It received recognition through the NIC Innovation Award, the Dare to Dream Award, and collaboration with industry including Ashok Leyland and Drive System Design.
I currently hold the patents for the technology.

Me, aura farming infront of a Tank
During my work with DRDO’s robotics division (R&D Engineers Pune), I worked on the design, dynamic simulation, and inverse kinematics of a robotic manipulator arm for combat support systems.
The project involved building a realistic simulation environment, developing a control interface using ROS 2 packages, and creating a hybrid kinematics algorithm to optimise manipulator movement and improve operational efficiency.
Video of initial prototype that I developed.
This project involved developing an AR glasses-based interaction layer and search tool. The system combined real-time image processing, computer vision, hand tracking, language processing, and AI to support information access and task execution.
Some details remain under NDA.
Project Highlights